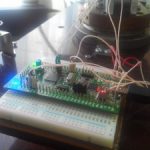
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors. The combat module control system and stabilization algorithms are performed in real time by a 32-bit microcontroller.
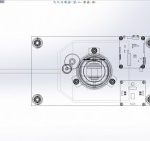
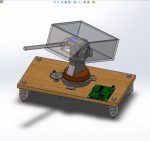
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Designing the model and in the package SolidWorks.
Model development
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.
Development of a physical model of a strapdown combat module stabilization system based on micromechanical inertial sensors.