Entwicklung von Navigations-, Steuerungs- und Überwachungssystemen
Entwicklung von Methoden, Algorithmen und Lageregelungssystemen von Erdsatelliten
Das Lageregelungssystem des künstlichen Erdsatelliten enthält Messinstrumente und Aktuatoren verschiedener Typen. Für solche Systeme gibt es die Erfahrung der Entwicklung:
- hochpräzise Algorithmen zur Orientierungsbestimmung unter Verwendung der Messungen von Gyroskopen; die Technik ihrer Effizienzbewertung;
- Berechnung der optimalen Konfiguration des quantitativ redundanten Aktorsystems: Gyrodine, Trägheitsschwungräder;
- Onboard-Algorithmen zur hochpräzisen Steuerung der künstlichen Satelliten-Neuorientierung zur Fernerkundung der Erde mit zufällig festgelegten Randbedingungen und wesentlichen elastischen Strukturelementen;
- Algorithmen zur rationalen Steuerung der redundanten Systeme von Gyrodinen oder Trägheitsschwungrädern;
- optimales Entladen des Gyrodynsystems oder der Trägheitsschwungräder mit Hilfe von gasreaktiven Motoren;
- Fehlertoleranz des Satellitensteuerungssystems in Notsituationen;
- Modellierung thermischer Prozesse im Satelliten und seinen integrierten Subsystemen bei Orbitalbewegung um die Erde.
Neuheit und Vorteile: Die Methoden und Algorithmen wurden sowohl zur Steuerung sowjetischer und ukrainischer Erdsatelliten in den letzten vierzig Jahren als auch für moderne Systeme verwendet.
Ausblick und Perspektiven: Entwicklung neuer und Anpassung bestehender Methoden und Algorithmen für Steuerungssysteme verschiedener Raumfahrzeuge.
Smart Quadcopter: Hybrid-Drohne zur automatischen Überwachung, Lieferung von Fracht sowie zur Sicherheitskontrolle und Sicherheit technischer Objekte
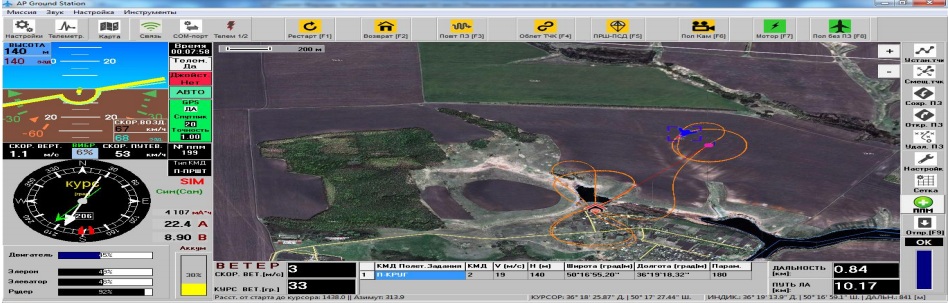
„Hybrid-Drohne“ mit einzigartigem „Gehirn“ -Navigationssystem kann während eines relativ langen Zeitraums (ca. 60-90 Minuten) fliegen und die Fracht über 6 kg transportieren. Aufgrund des „Gehirns“ des Navigationssystems erfolgt alles autonom Modus nach einer vorgegebenen Route und einem vorgegebenen Aufgabenprogramm. Die Probleme, die unsere Drohne löst, hängen hauptsächlich mit der Landwirtschaft zusammen: Überwachung und Luftaufnahme von Waldplantagen und Ackerland, chemische und biologische Behandlung landwirtschaftlicher Flächen, Schutz und Überwachung der Fischereigewässer. In Zukunft kann es in anderen Bereichen eingesetzt werden, z. B. in den Bereichen Sicherheit, Suche und Rettung, Überwachungssysteme usw.
Neuheit und Vorteile
1. Die Nutzlast beträgt bis zu 6 kg.
2. Die Flugdauer beträgt bis zu 1,5 Stunden.
3. Ein Fehler bei der Koordinatenbestimmung beim Pilotieren in Gegenwart von GNSS-Signalen beträgt nicht mehr als 5 m und in Abwesenheit von GNSS-Signalen nicht mehr als 150 m in den ersten 20 Flugminuten.
4. Bei GNSS-Signalen, die innerhalb von 3 Minuten wiederhergestellt werden, wird die volle Funktionalität des Navigationssystems wiederhergestellt.
Ausblick und Perspektiven: Die Verwirklichung unserer Idee erfordert die Finanzierung eines Mietverhältnisses und der Testplattform, den Transport des Quadcopters auf der Plattform und zurück. Marketingdienstleistungen (Marketinguntersuchungen, Suche nach Verbrauchern der Unternehmen) und Entwicklung der Website mit der Beschreibung des zu verkaufenden Produkts, der Liste der Dienstleistungen, dem Werbebudget und dem Fortschritt der Website im EU-Raum.
Robuste Steuerung des UAV mit Mini-Autopilot
Das Rollkanal-Nennmodell und seine Unsicherheiten für das Flugflügel-UAV wurden aus mehreren Flugtestdaten mit geschlossenem Regelkreis ermittelt, und dann wurden a priori das erste theoretische Modell und die Grenzen der Unsicherheiten korrigiert und modifiziert. Anschließend wurde ein robustes Steuersystem für den Rollkanal entwickelt, um die Qualität und Robustheit des Flugsystems während der Systemintegration bei Vorhandensein von Unsicherheiten, Störungen, Geräusch- und Stellgliedposition sowie Geschwindigkeitsbegrenzungen zu erhöhen. Es wurde gezeigt, dass das entworfene robuste Steuerungssystem bei Vorhandensein von Querruderwinkel- und Geschwindigkeitsbegrenzungen eine bessere Qualität für das unsichere UAV-Modell als den PID-Regler garantieren kann. Das Design von Steuerungssystemen ist ein Kompromiss zwischen widersprüchlichen Anforderungen.
Oleksiy Larin – Direktor des Instituts für Bildung und Wissenschaft in Ingenieurwesen und Physik – Professor, Doktor der technischen Wissenschaften: oleksiy.larin@khpi.edu.ua
Olena Slipchenko – Direktor des Europäischen Zentrums für für Bildung, Wissenschaft und Technologie – Ph.D. in technischen Wissenschaften, Erfahrener Wissenschaftler: Olena.Slipchenko@khpi.edu.ua