Розробка систем навігації, управління та контролю
Розробка методів, алгоритмів та систем управління ставленням штучних супутників Землі
Система контролю штучного супутника Землі включає в себе вимірювальні прилади та виконавчі механізми різних типів. Для таких систем існує досвід розробки:
- високоточні алгоритми визначення орієнтації за допомогою вимірювань гіроскопів; техніка їх оцінки ефективності;
- розрахунок оптимальної конфігурації кількісно надлишкової системи приводів: гіродини, інерційні маховики;
- вбудовані алгоритми високоточного управління штучною супутниковою переорієнтацією для дистанційного зондування Землі із випадково заданими граничними умовами та основними пружними структурними елементами;
- алгоритми раціонального управління надлишковими системами гіродинів або інерційних маховиків;
- оптимальне розвантаження гіродинної системи або інерційних маховиків за допомогою газореактивних двигунів;
- відмовостійкість супутникової системи управління в надзвичайних ситуаціях;
- моделювання теплових процесів у супутнику та його бортових підсистемах при орбітальному русі навколо Землі.
Новизна та переваги: Методи та алгоритми використовувались як для управління радянськими та українськими супутниками Землі протягом останніх сорока років, так і для сучасних систем.
Перспективи: Розробка нових та адаптація існуючих методів та алгоритмів для систем управління різними космічними кораблями.
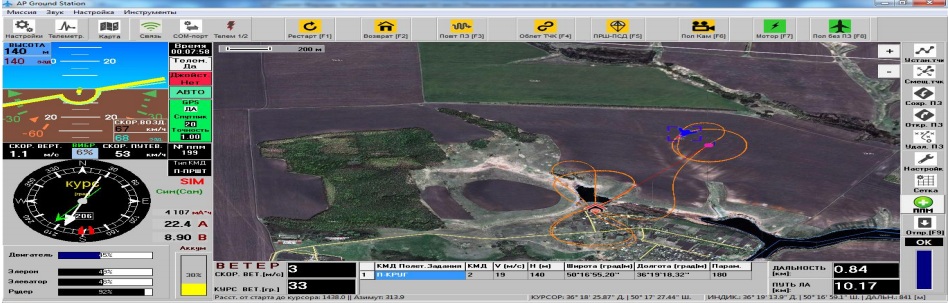
Smart Quadcopter: гібридний безпілотник для автоматичного моніторингу, доставки вантажів та контролю безпеки та безпеки технічних об’єктів
«Гібридний безпілотник» з унікальною навігаційною системою «мізки» здатний літати протягом відносно тривалого періоду часу (близько 60-90 хв.), Перевозячи вантаж вагою понад 6 кг, а завдяки «мізкам» навігаційної системи всі працюють в автономному режимі режим відповідно до заздалегідь визначеного маршруту та програми завдань. Проблеми, які вирішує наш безпілотник, пов’язані головним чином із сільським господарством: моніторинг та аерофотозйомка лісових насаджень та сільськогосподарських угідь, хімічна та біологічна обробка сільськогосподарських угідь, охорона та моніторинг риболовних вод. У майбутньому його можна використовувати в інших сферах, таких як безпека та безпека, пошук та порятунок, системи моніторингу тощо.
Новизна та переваги:
1. Корисне навантаження до 6 кг;
2. Тривалість польоту до 1,5 годин;
3. Помилка визначення координат при пілотуванні за наявності сигналів GNSS становить не більше 5 м, а за відсутності сигналів GNSS не більше 150 м за перші 20 хвилин польоту;
4. Повна функціональність навігаційної системи відновлюється у разі відновлення сигналів GNSS протягом 3 хвилин.
Перспективи: Реалізація ідеї вимагає фінансування орендної плати та випробувальної платформи, транспортування квадрокоптера на платформу та назад. Маркетингові послуги (маркетингові розслідування, пошук споживачів компаній) та розробка веб-сайту з описом товару для продажу, переліком послуг, рекламним бюджетом та просуванням веб-сайту на просторі ЄС.
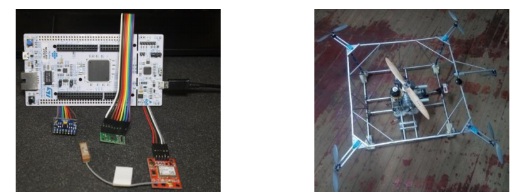
Стійке управління БПЛА за допомогою міні-автопілота
The roll channel nominal model and its uncertainties for the flight-wing UAV were found from several closed-loop flight-test data and then, a priori initial theoretical model and bounds of uncertainties were corrected and modified. Then robust control system for the roll channel was designed to increase the quality and robustness of the flight system during the system integration in the presence of uncertainties, disturbances, noise and actuator position, and rate limits. It was shown that the designed robust control system can guarantee better quality for the UAV uncertain model than the PID controller in the presence of aileron angle and rate limits. Control system design is a compromise between contradictory requirements.
Ларін Олексій Олександрович – Директор Навчально-наукового інженерно-фізичного інституту – Професор, доктор технічних наук: oleksiy.larin@khpi.edu.ua
Сліпченко Олена Вікторівна – Директор Європейського освітньо-науково-технологічного центру – Кандидат технічних наук, старший науковий співробітник: Olena.Slipchenko@khpi.edu.ua