На початку листопада чудова погода дозволила нам провести польові випробування нашої нової кіберфізичної мобільної платформи CRT01. У якості майданчику ми обрали чудове внутрішнє подвір’я нашого Електротехнічного корпусу. Облаштування цього майданчику має різні ландшафтні фрагменти: асфальтований шлях, дорога з грунтовим покриттям, а також невеличкий пагорб з трав’яним покривом, деревцями та кущами. Таким чином ми змогли перевірити ходові характеристики платформи у різних умовах без необхідності пошуку спеціалізованих полігонів в безпосередній близькості до нашої лабораторії.

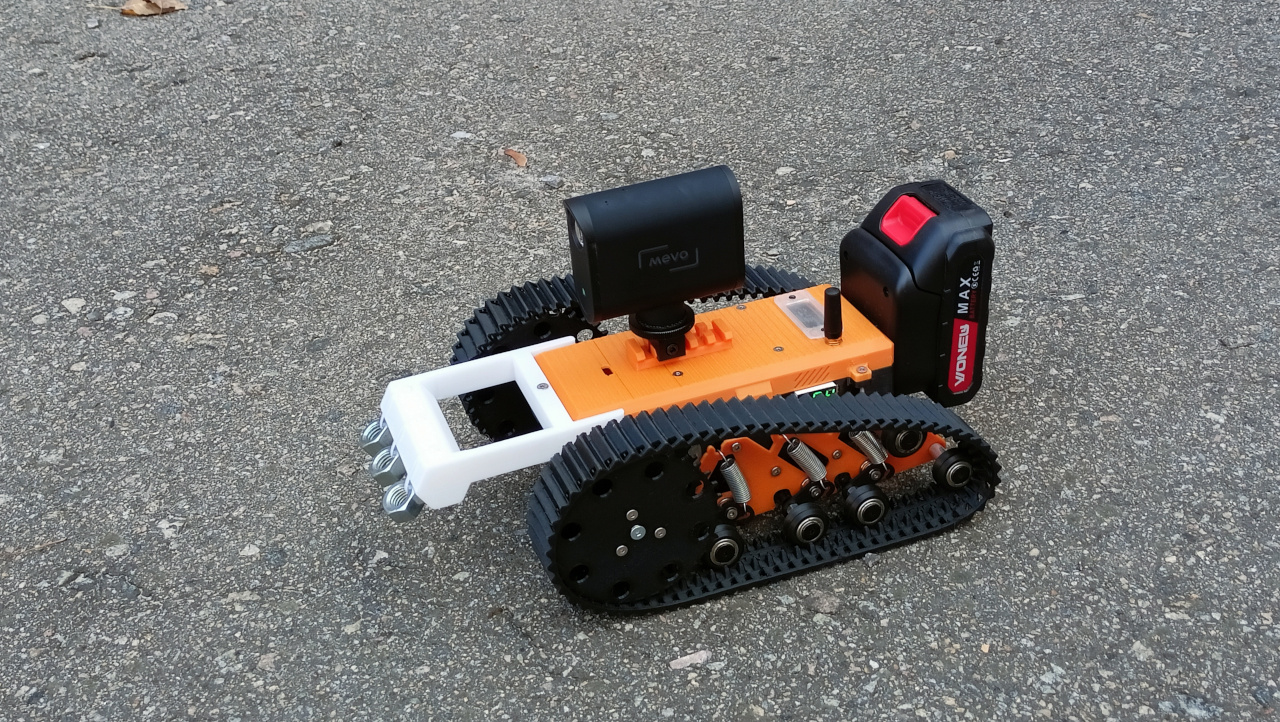

Розроблена нами платформа має гусеневе шасі, керування здійснюється за бездротовим протоколом ESP-NOW з консолі з сенсорним екраном на базі платформи ESP32.
Головною особливістю платформи є максимальне використання механічних деталей, надрукованих на 3D-принтері. Корпус, елементи кріплення, важелі та коліщатка, навіть гусені було надруковано за допомогою спеціального гнучкого пластику (резиновий філамент).
При проведенні тестового заїзду здійснювались перевірки прохідності та маневреності у різних типах ландшафтів, здатність платформи долати перешкоди, швидкісні характеристики. Також перевірялись якість зв’язку між пультом та платформою, а також можливість використання автономної веб-камери з оперативним записом та трансляцією безпосередньо з платформи.



При тестуванні було виявлено певні проблеми з балансом ваги, особливо при русі по похилих поверхнях та при доланні перешкод. Також є певні складнощі для стабільного руху при потраплянні надто жорстких об’єктів між гусінню та коліщатками.
В цілому платформа показала дуже пристойні результати при русі по складних поверхнях, при доланні перешкод та маневруванні на великій швидкості на асфальтованій поверхні. Також було відмічено дуже високу енергоефективність. Дослідники були задоволені результатами та відмітили подальший напрям робіт з вдосконалення платформи.