
Силами студентів на кафедрі СПУ було розроблено самохідну платформу на гусеничному ходу. Платформа може використовуватися як база для саперного робота, робота-дослідника.
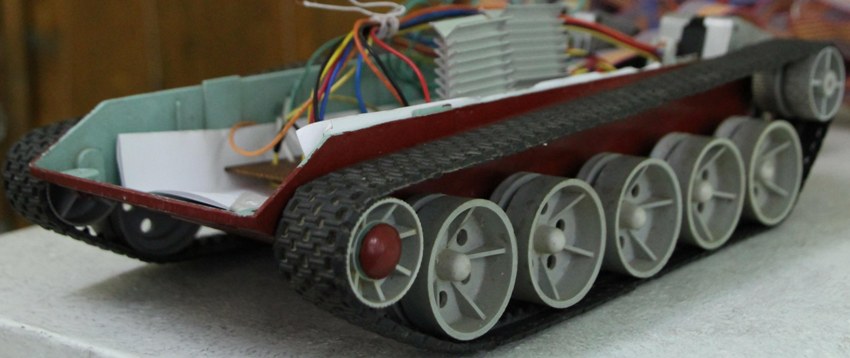
Привід рушія – два крокові мотори, безпосередньо з’єднані з провідними колесами. Завдяки гусеничному шасі платформа отримала можливість розвертатися на місці та долати відносно великі перешкоди. Використовуючи розроблені алгоритми платформа може рухатися заданою траєкторією, досягати зазначеної точки, переміщатися через задані проміжки часу. Платформа може з’єднуватися з ПК через порти LPT, COM, USB. У початковому варіанті керування велося через кабель.
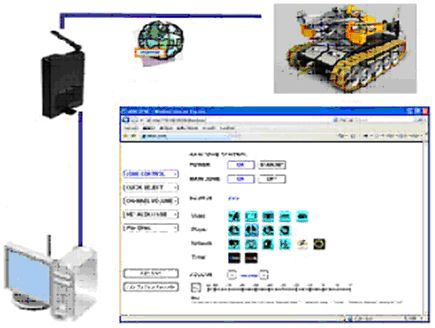 Зараз створюється автономна платформа з керуванням через WEB інтерфейс. Оператор може контролювати роботу платформи через камери та телеметрію. Телеметрія включає картинку з відеокамери, GPS координати, координати БІНС, швидкості руху (за трьома координатами), швидкості повороту (за трьома напрямками) рівень заряду акумулятора, рівень потужності кожного двигуна, температуру системи, температуру і тиск забортного повітря, висоту підйому над рівнем моря.
Зараз створюється автономна платформа з керуванням через WEB інтерфейс. Оператор може контролювати роботу платформи через камери та телеметрію. Телеметрія включає картинку з відеокамери, GPS координати, координати БІНС, швидкості руху (за трьома координатами), швидкості повороту (за трьома напрямками) рівень заряду акумулятора, рівень потужності кожного двигуна, температуру системи, температуру і тиск забортного повітря, висоту підйому над рівнем моря.
 У вересні 2011 року розпочато роботу студентської науково-технічної групи з розробки дослідного зразка транспортної платформи (міні-дирижабля) з використанням системи управління, розробленої для самохідної гусеничної платформи. Дирижабль може бути використаний для побудови системи моніторингу поверхні землі. Апарат здатний зависати над будь-якою точкою та робити зйомку, передаючи зображення на центральний пункт управління. Це може стати в нагоді при спостереженні за автомобільними трасами, будовами, зонами лих. Повітряні відеокамери, що вільно змінюють розташування, забезпечать кращу картинку з футбольного матчу, автоперегонів, спортивних змагань, концертів.
У вересні 2011 року розпочато роботу студентської науково-технічної групи з розробки дослідного зразка транспортної платформи (міні-дирижабля) з використанням системи управління, розробленої для самохідної гусеничної платформи. Дирижабль може бути використаний для побудови системи моніторингу поверхні землі. Апарат здатний зависати над будь-якою точкою та робити зйомку, передаючи зображення на центральний пункт управління. Це може стати в нагоді при спостереженні за автомобільними трасами, будовами, зонами лих. Повітряні відеокамери, що вільно змінюють розташування, забезпечать кращу картинку з футбольного матчу, автоперегонів, спортивних змагань, концертів.
 Окрім відеокамери на апараті можливе розміщення прожекторів. Підняті на висоту вони забезпечать освітлення великої площі. При розробці пілотного проекту було створено пакет документації, що включає конструювання основних вузлів мінідирижабля, аеродинамічні та розрахунки на міцність, оцінку економічної ефективності проекту і створення системи управління.
Окрім відеокамери на апараті можливе розміщення прожекторів. Підняті на висоту вони забезпечать освітлення великої площі. При розробці пілотного проекту було створено пакет документації, що включає конструювання основних вузлів мінідирижабля, аеродинамічні та розрахунки на міцність, оцінку економічної ефективності проекту і створення системи управління.
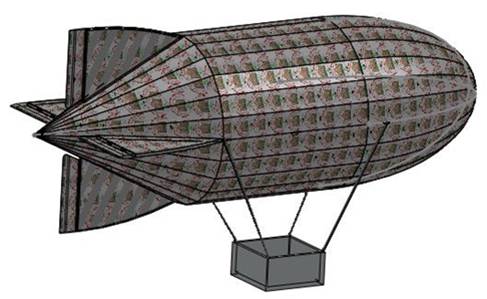 Зовнішній вигляд конструкції
Зовнішній вигляд конструкції
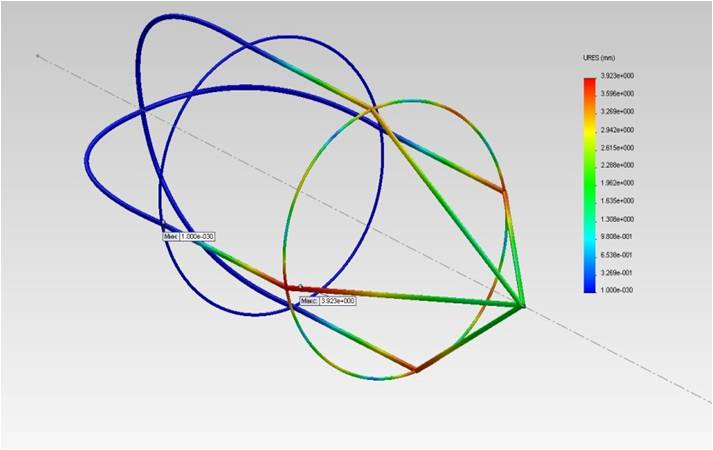 Розрахунок міцності
Розрахунок міцності
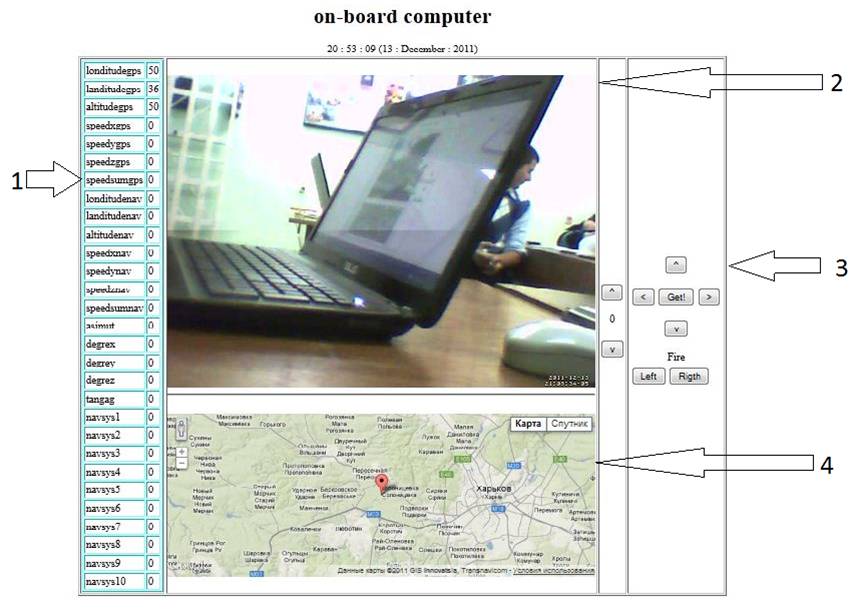 Інтерфейс оператора
Інтерфейс оператора